この記事をまとめると
■NEXCO中日本は「路車協調実証実験」を新東名高速の工事区間の一部で実施
■公募によって集まった10の企業が高速道路の本線を利用してさまざまな実験を展開
■クルマとは一見関係なさそうな企業も多数参加していた
10もの企業がひとつの場所で大規模実験
自動車業界では、ここ数年で急速に「自動運転」やら「コネクテッド」といった未来感溢れるワードが見受けられるようになった。
また、東京モーターショー改め2023年のジャパンモビリティショーでも、そういった先進技術に関する展示などが数多く見受けられた。いま、クルマを含むモビリティ全般にかかわる上でこういった先進技術は無視できない分野だ。
今回取材で訪れたのは、静岡県小山町にて建設作業中の新東名高速における、新秦野ICから新御殿場ICの上り線、約2.8kmにも及ぶエリアの一部(工事事務所などがある場所)だ。
ここで今回、NEXCO中日本は「路車協調実証実験」と呼ばれる、日本初の試みを公開した。なんだか難しそうな話に思えるが、今後の日本のモビリティを支える上で、重要な実験が詰め込まれているのが今回の取り組みだ。
まずこの実験について簡単に説明する。これは、新東名高速の新秦野ICから新御殿場ICの約2.8kmにも及ぶ”実際の高速道路の本線”を使って、公募によって集まった10社がさまざまな実証実験を行なっているというモノ。ちなみにこの区間は2027年開通予定となっている。つまり、開通前のいまだからこそできる貴重な機会ということになる。
その実証実験では、今回訪れた2.8kmの区間と少し離れた東京方面の場所にある3.1kmのトンネル区間を使い、ユースケース1から7までのジャンルわけをした内容を実施している。それが以下だ。
ケース1:路上障害情報の後続車への提供 ケース2:路面状況や走行環境に応じた最適な速度情報等の提供 ケース3:車載センサー等を活用した維持管理情報や運行支援情報等の収集・提供 ケース4:コネクテッド車の緊急停止時における遠隔監視・操作 ケース5:交通状況に応じた情報提供による高速道路ネットワークの最適化 ケース6:交通状況に応じた車郡制御情報の提供による交通容量の最大活用 ケース7:目的地別の追従走行支援
上記のように、実際に高速道路上で発生しうるトラブルや今後必要と思われる技術などを、この場を使ってテストしているということになる。とはいえ、NEXCO中日本だけではこれらのケースをすべて実験することは到底不可能。そこで、各企業が「これはいいチャンス!」となり、集まったわけだ(参加費などはなかったようだ)。今回参加している企業は以下。
・沖電気工業 ・KDDI ・交通総合研究所(いすゞ自動車・オリエンタルコンサルタンツ・京セラ・住友電気工業・先進モビリティ・トヨタ自動車・豊田通商・日野自動車・三菱ふそうトラック.バス・UDトラックス) ・ソフトバンク(本田技研工業・本田技術研究所) ・名古屋電気工業 ・日本電気 ・富士通 ・古河電気工業 ・三菱重工機械システム ・三菱電機
※五十音順
これらの企業が、7つのユースケースのなかで自社の得意分野や研究している分野にかかわっているといった内容だ。なので、「当社はケース3しか扱ってません」みたいな場合もある。
今回はとくに「路車間通信」という、クルマ側のセンサーや道路上に設置されたセンサーとの通信技術の研究に重点を置いているとのこと。自動運転やコネクテッドといった技術は日々研究が行われているが、これらはクルマだけいくら進化しても、それらが走る道路などのインフラとも連携しないとじつは完璧に機能しない。クルマも道路も一緒に進化していく必要がある。
最近のクルマに搭載されている「TSPS」といった、ITS(Intrigant Transformation System=高度交通システム)を利用して信号の変化を教えてくれる便利な装備もそのひとつだ。
では、これらの実験で得たデータはどうするのだろうか。
NEXCO中日本によると、ここで蓄積したデータは、関係省庁と有識者により検討された「デジタルライフライン全国総合整備計画」におけるアーリーハーベストプロジェクトとして、新東名の駿河湾沼津SAから浜松SAの約100kmで計画されている「自動運転車優先レーン」の設定などに生かされるとのこと。「実験してそこで終わり」ということはないようだ。
この実験は2024年5月13日からスタートしており、本年7月末までの3カ月の間で行われる。
実験に必要な車両やセンサーなどの機械は各社がもち込んでおり、高速道路上に設置されているポールなどにそれぞれ場所を譲り合って取り付けている点も面白い。これらは、本線が運用される際には取り外されるとのことなので、開通後にその面影を見ることはないそうだ。ちなみにこの区間にはこういったポールが9本設置されている。
自動車メーカーはここで何をしている?
さて、先のページで述べたように、この路車協調実証実験には、10もの企業が参加している。一部はそのバックに企業がついている場合もあるので、細かくわければその数は倍以上だ。
今回は、この実験にかかわっている「KDDI」と「ソフトバンク(ホンダ)」の3社に、どんなことをしているのか少しだけ話をうかがった。
まずは携帯電話会社の「au」でお馴染みのKDDIだ。同社は一見クルマとは無縁そうに見えるが、20年以上に渡ってトヨタと協力関係にある。たとえばトヨタのカーナビに備わり、2022年までサービスが提供されていた電話帳などが取り込めるG-BOOKなどのサービスもKDDIがかかわっている。また、レースの世界、スーパーGTでも長年auの看板を背負ったマシンが、トヨタのワークスとして活動するTOM’Sから出走している。ディーラーではauの携帯電話を買えたりもしたので、クルマと密接な関係にある。
今回、KDDIは主に光ファイバーによる高速通信技術のテストを行なっているとのこと。我々にデモンストレーションで見せてくれたのは、遠隔操作による自動運転技術だ。
これは、管制室のような場所から、自動運転で走る他者のクルマを操作するというモノ。これだけ聞くと、そう珍しい技術ではないのだが、ここで問題となるのが画像による遅延だ。クルマは走っているので、道路や周辺の状況は刻一刻と変わる。なので、「なんとなく見えてればいい」では大事故になりかねない。
そこでKDDIは、とにかく通信ロスの少ない、光ファイバーを使った超高速データ通信技術と、それでもカバーしきれない周囲の状況をAI技術などで予測して、遠隔で操作する作業員に状況をいち早く伝える技術を研究。「ケース3:車載センサー等を活用した維持管理情報や運行支援情報等の収集・提供」「ケース4:コネクテッド車の緊急停止時における遠隔監視・操作」のセクションにかかわっているという。
使用するクルマは研究開発期間向けに販売されている、トヨタ・エスティマをベースにした自動運転車(レベル4相当まで対応)で、KDDIが開発したセンサーを各種搭載する。自動運転技術には欠かせないセンサーであるLiDARがひとつと、各種カメラが6つ備わる。
「なんでKDDIが高速道路で実験?」となるかもしれないが、じつは自動運転技術の発展には欠かせない企業のうちの1社なのだ。
次に、ソフトバンクとホンダの取り組みを見ていこう。
両社は、やはりKDDIとトヨタ同様に長きに渡って業務提携を行なっている。今回両社は、セルラーV2Xというクルマとさまざまな設備や端末と通信する技術を用いて、事故リスク減少を目的とした実験を行っている。「これってKDDIと被るのでは?」という疑問も出るかもしれないが、簡単にいうと前者は映像などのデータ容量が重い通信、後者は比較的軽量な通信を行うといったことで棲みわけされているとのこと。
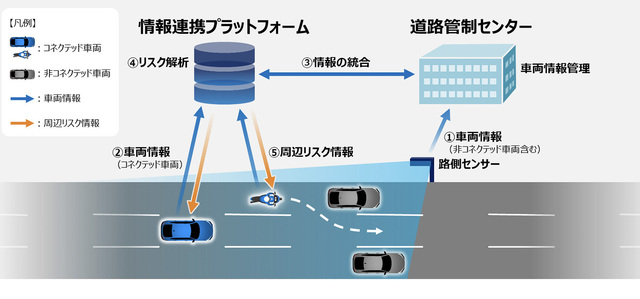
今回は、実験コース内に設置されたセンサーとコネクテッド技術を使って、前方の車両(バイク)の急な車線変更をいち早く後続車に知らせるというシステムを実験していた。これは、非コネクテッドカーとコネクテッドカーが混在する実際の状況に近い想定で行われており、情報通知と数秒先のリスクを想定し、事故や急減速といったリスク回避をすること目的だ。
流れを簡単に説明すると、以下のようになる。
①:高速道路上のセンサーが車両の動きを検知 ②:車両情報を道路管制センターが受信 ③:情報連携プラットフォームでリスク解析 ④:周辺リスク情報や車両情報を周囲のクルマに瞬時に共有
このようなデータのやり取りを瞬時に行うための技術を、ソフトバンクとホンダで開発中という。あまりにも経由するポイントが多いので、「本当にこれが走ってるクルマにロスなく伝わるのか?」と確認したが、「大丈夫です」と自信満々な返答。
ちなみに、コネクテッドカー同士であれば道路管制センターを経由せずにクルマ同士で通信が可能なので、より素早くリアルタイムに周囲のクルマの挙動が、ドライバーに伝わる環境となるとのこと。
今回は、「コネクテッド対応のバイク」と「コネクテッド対応のクルマ」、「非コネクテッドのクルマ」の3台を使っており、例として「急な車線変更をしてくるバイク」を通知する実験がメインであった。
「すでにあるBSM(ブラインドスポットモニター)とは何が違うのか?」と聞くと、「あちらは接近してきてから機能するので遅いのです。こちらは車線変更のリスクを前もって瞬時に予測して、コネクテッドに対応したクルマのドライバーに瞬時に知らせるので、より安全です」との返答があった。バイクやクルマの加減速時のスロットル開度までモニタリングし、そこからの動きを予測することもできるそうだ。
※画像はイメージ
さらに、ホンダではバイクとクルマを販売しているアドバンテージがあるので、それぞれの車両の動きを予測するタスクアルゴリズムの構築にも強い。バイクにおける右直事故が非常に多いが、どちらかひとつしか扱ってないメーカーや、IT関連のメーカーだとそういった事故のデータ量に乏しいので、いざ安全技術に手を出そうとしてもあまりノウハウがない。しかし、ホンダであればどちらも対応することが可能だ。
そこにソフトバンクの通信技術が組み合わさることで、ホンダが掲げる「2050年までに交通事故死亡者数をゼロにする」という目標により近づくというわけだ。
ぜひ実際に見てみたかったが、この日は実験が行われなかったのが悔やまれる。
「これは実験であって製品化などはされるのか?」と思ったので、この技術の将来についても聞いてみたところ、「この技術を生かした製品は2020年代には展開したいと思っている」という前向きな回答も得られた。
この日は、前方になんらかのトラブルで停止したクルマから発した情報を後続の大型トラックが受信し、未然に追突事故を防ぐといったデモンストレーションなども実施。ここで使われたトラックは日野のプロフィアがベースで、LiDARが5つとカメラが6つ装備された車両を使用していた。この車両は「ケース3:車載センサー等を活用した維持管理情報や運行支援情報等の収集・提供」に使われているとのこと。
NEXCO中日本は、この実験の場を7月末まで展開し、その後は開通へ向けた工事を行うとのことで、今後同じような実証実験をやるかは未定とのことだったが、「工事途中の路線で実証実験をした」というケースが存在することにより、日本のどこかで高速道路や一般道の工事を実施する過程で、似たような先進的な実験を行えるかもしれない。
たった3カ月、距離にして5km程度の範囲で行われた実験ではあるが、この実験は自動車業界の技術発展における大きな一歩になるはずだ。